登录/注册
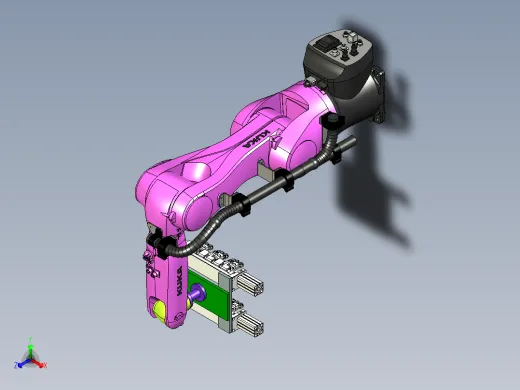
机器人塑料件真空抱具设计parasolid 三维模型
三维机械图纸名称为:机器人塑料件真空抱具设计,属于机械设备,智能装置分类,软件为parasolid, 三维模型格式为x_t,可在线预览,可编辑,可供设计参考














模型参数
模型ID:10146922
模型大小:7.14M
软件版本: parasolid
模型格式:x_t
是否可编辑:可修改,包括参数
上传时间:2022-11-06
图纸介绍:
文件列表
1. 机器人塑料件真空抱具设计.x_t
23.8 MB
【机器人塑料件真空抱具设计】相关作品







































下载提示
×